
深蓝资本是专注在科技创新领域的投资银行,通过私募融资、兼收并购等服务帮助科技领袖打造世界级公司。团队具有丰富的科技行业投行和投资经验,创立之初即获得多家头部VC加持。深蓝资本行业研究专注于中国科技产业,服务于顶级企业家、投资机构,通过严谨的数据分析、调研和专家访谈,提供定制化的研究服务,助力客户在复杂的市场环境中做出明智的战略选择与决策。秉持“深度洞察,引领投资”的理念,与您共同探索市场的无限可能。
本期聚焦:具身智能行业-触觉传感器
一、行业概况——触觉传感的意义与演化史
1. 1 触觉传感的核心价值
随着机器人技术的快速发展,触觉传感器作为智能机器人和自动化设备的重要感知模块,正在发挥越来越关键的作用。触觉不仅仅是对外部环境的简单感知,更是机器人自主交互与智能决策的重要支撑。在传统工业作业和机器人作业中,触觉的应用场景和技术需求存在显著的区别。
2023年11月2日,工业和信息化部发布《人形机器人创新发展指导意见》,明确提出要让机器人向智能化、类人化方向发展,其中触觉传感被列为关键技术之一。
1.1.1 从工业作业到机器人作业:智能化发展的关键一步

这意味着,传统的工业机器人依靠固定编程即可完成任务,而未来的智能机器人需要具备类人化的感知能力,能够在复杂环境中自主学习、适应和调整操作策略。
1.1.2 端到端训练:推动机器人智能化的关键
在机器人智能化发展过程中,端到端训练(End-to-End Learning)是一种重要的方法,它让机器人直接从原始传感数据(如视觉、触觉、语音等)中学习决策和控制,而不再依赖传统手工定义的规则。
端到端训练的核心流程包括以下几个步骤:

这一过程让机器人在复杂环境中能够实现自适应学习,提高任务执行的精准度和稳定性。特别是在柔性覆盖、高灵敏度传感、非结构化环境适应等方面,端到端训练结合触觉传感器,将带来革命性的进步。
1.1.3 人形机器人对触觉的特殊需求
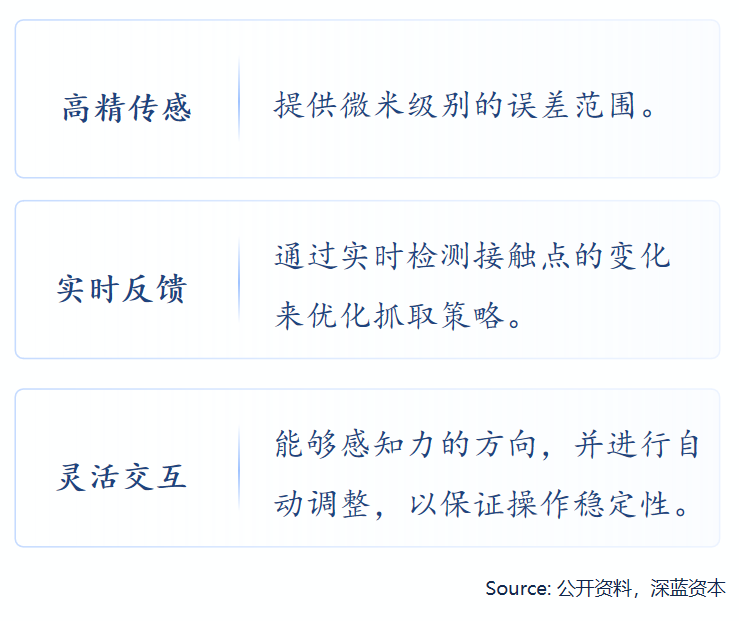
为了让机器人更接近人类,触觉传感器必须与视觉、听觉等感知系统相结合,形成“触觉+”方案,实现更强的泛化能力。例如:
- 通过触觉反馈,提高机器人的操作精度,使其能够处理不同材质的物体(如玻璃、金属、橡胶等)。
- 结合减速器、电机、力传感等核心部件,使机器人在复杂交互任务(如组装、抓取易碎物品)中保持稳定性。
- 机器人通过触觉传感数据优化力的分布,使其在抓握过程中实现平衡力控制,提升自主适应能力。
1.2 触觉传感的历史演化与应用场景
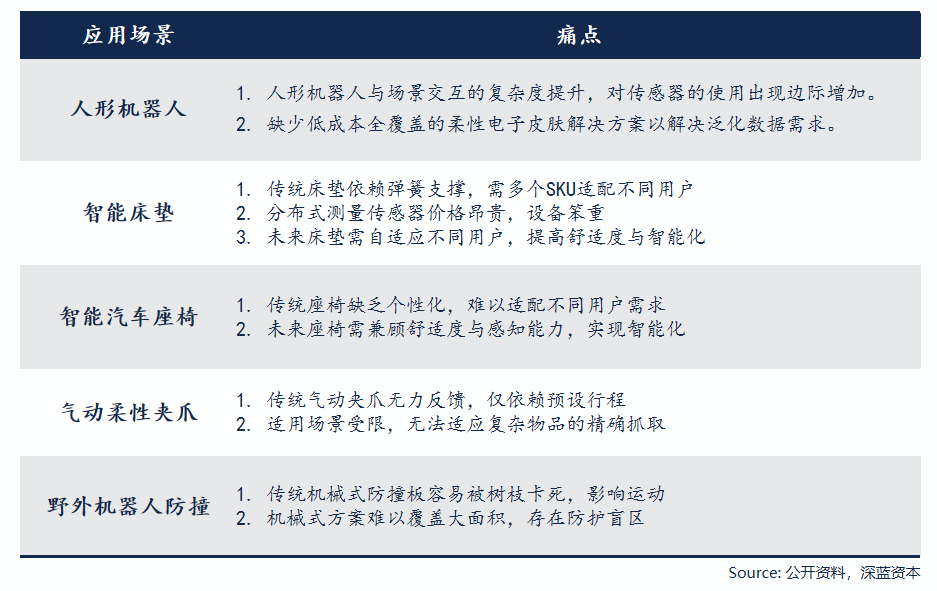
随着机器人作业环境向非结构化、复杂化发展,触觉传感器的应用需求逐渐显现,应用领域也不断扩展。目前,除传统工业检测场景外,触觉传感器下游应用开始向更广泛的工业、机器人、消费品、医疗等场景演化。
1.2.1 1950s:初创阶段——结构性传感
技术特点
- 这一时期的触觉传感器以结构型传感器为主,主要基于电阻应变式技术,如电阻式触觉传感器。
- 其工作原理是将物理量(如温度、压力、光强等)转换为电信号,以实现最基础的物理测量功能。
关键局限
- 只能检测单一物理量,功能较为单一。
- 由于没有数据化输出能力,无法实现信号处理和反馈。
- 受限于技术水平,传感器的精度、可靠性和适用性都存在较大限制。
- 主要应用于工业自动化和环境监测,在精密度要求较低的场景下用于物理信号检测。
1.2.2 1970s:发展阶段——微电子技术推动
技术特点
- 半导体与微电子技术的发展促进了触觉传感器的进步,出现了压阻式、电容式、电感式等技术。
-
研究开始关注新的物理效应,如光电效应、霍尔效应、热释电效应等,提高传感器的电子反馈能力。
关键局限
-
受限于基础材料和工艺水平,传感器的集成度较低。
- 由于环境适应性差,影响了测量的稳定性和可靠性。
应用
- 这一阶段的触觉传感技术仍以工业检测、航空航天、科学研究为主,逐步向更复杂的场景拓展。
1.2.3 1980s:重要转折点——MEMS传感器与集成化
技术特点
- MEMS(微机电系统)技术的兴起:1987年,ADI(Analog Devices)率先投入MEMS传感器的研发,使其具备小型化、智能化、低功耗等优势。
- MEMS触觉传感器开始应用于手机、电灯、水温检测等精密仪器,推动了智能硬件的发展。
关键局限
- 仍然缺乏多模态传感能力,难以满足更复杂的应用需求。
- 批量生产难度较高,MEMS加工工艺成本较高,良率较低。
应用
- 这一阶段的触觉传感器开始广泛用于消费电子,如手机、可穿戴设备等,逐步进入民用市场。
-
在工业应用中,触觉传感器的集成化程度提高,提升了精密检测设备的智能化水平。
1.2.4 2010s+:多元技术融合——触觉传感的智能化突破
技术特点
-
这一时期,触觉传感器迎来了多元技术路线的发展,包括:
-
逾渗式压阻传感器
-
视觉触觉传感器
-
柔性电子皮肤
-
力矩传感器
-
多模态融合传感器
-
关键局限
- 高精度、多模态传感器仍然价格昂贵,导致商业化应用受限。
-
传感器系统的集成复杂度提高,对AI计算能力的依赖性增强,增加了研发成本。
应用
- 这一阶段,触觉传感器的应用领域迅速拓展,不再局限于工业检测,而是开始渗透到更广泛的消费市场和智能科技领域。传感器的工艺精度、材料柔性和可靠性都得到了大幅提升,使得触觉传感开始向消费级、医疗、智能机器人等领域渗透。
1.3 触觉传感器核心评价指标
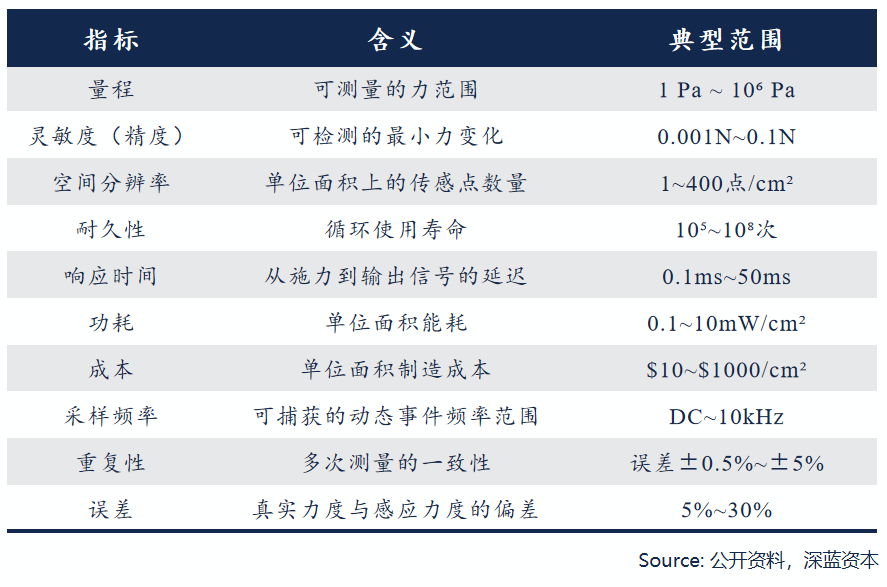
传感器的核心性能指标通常包括量程、灵敏度、分辨率和耐久性,同时还涉及柔性化程度、覆盖面广度、测量力维度等参数。指标评价需结合具体应用场景,确保其在特定环境和需求下的有效性与适用性。
二、技术分析 —— 各技术路线拆分与对比
2.1 压阻式
传统压阻式方案是最早出现的技术路径,由于结构简单、定制化成本低等特性被广泛采用,但该方案也存在灵敏度较低、动态范围小以及涂层工艺导致的环境适应性较差等劣势。

2.1.1 基本原理
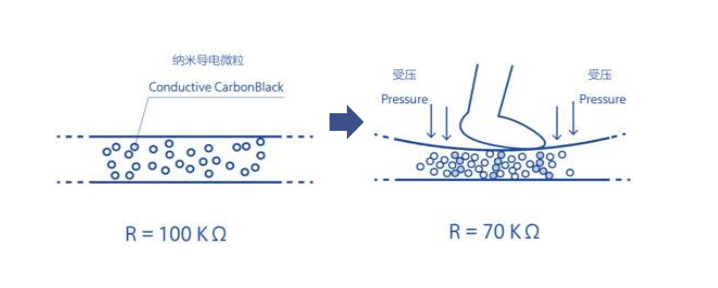
利用材料在受力变形时电阻发生变化的特性。压阻效应在微观上源于导电路径的变化,或是材料的几何形状变化导致电阻变化(纵向压缩、横向扩展),或是导电颗粒在非导电基质中的接触面积增加形成新的导电路径。
-
上下电极层(通常是铜、银或导电碳墨) -
中间压敏层(可以是导电橡胶、碳纳米管混合物或压敏墨水) -
力传递结构(确保力均匀分布) -
保护封装层
-
定制化成本低:材料与制造成本低,适合大规模铺设(如机器人表皮)。 -
结构简单:印刷电子技术可大面积量产,适用于柔性电子皮肤。 -
广泛适用性:可以实现从大面积覆盖(如机械臂)到小型触觉点(如指尖)的灵活配置。
-
灵敏度较低(相比电容/光学):难以检测极小压力变化,分辨率有限。 -
动态范围小:难以同时感知微小和大力触碰,容易饱和。 -
长期稳定性较差:受材料老化和温漂影响,需要频繁校准。 -
耗能多:需要持续供电测量电阻值,相比无源元件会耗能更多。
2.2 逾渗式
区别于传统压阻式,本质上放弃材料优化思路,通过导电网络的结构性优化,实现绝缘体→半导体的逾渗现象,提升精密力度检测的灵敏度、摆脱涂层工艺的可靠性问题,并延续压阻式的柔性高、成本低、物理像素小、结构薄等优势。
-
上下电极层 -
中间压敏层 -
保护封装层
-
固态连续性:
-
-
绝缘体与导电颗粒之间天然融合,原理发生在材料内部,无涂层剥离风险。 -
适用于卷对卷(Roll-to-Roll)大面积制造,降低生产成本,可适配不同基材。 -
耐久性强,适应复杂环境: -
无传统涂层, 可耐刮擦、弯折和冲击,即使长期使用也不影响传感能力。 -
适用于高压、高温、潮湿等极端环境,避免传统压阻式因环境变化产生性能损耗。
-
-
多维力测算:通过对物理像素的曲面分布,实现传感器3D分布三维力测算,突破传统传感器一维力测算局限。
-
导电填料优化(信号稳定+寿命长): -
采用纳米氧化物、碳基材料(如碳纳米管、石墨烯)、金属微球等导电颗粒,提高信号一致性。 -
颗粒形态和分布优化,填料与基材可键合,确保导电网络稳定,不因应力老化而退化。
-
-
基材多样化(工程适配性强): -
床垫/座椅类:采用高弹性聚合物,提高舒适性并适应人体曲面。 -
高温/工业应用:选择耐高温交联性材料,如特殊硅胶,满足严苛环境需求。
-
2.3 电容式
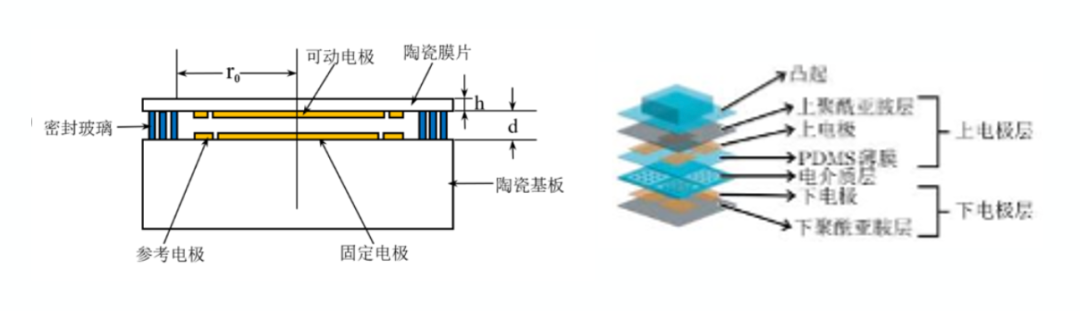
-
上下电极层(通常是ITO、金或银纳米线等透明导电材料) -
可压缩介电层(通常是PDMS、聚氨酯或微结构化弹性体) -
互连线路(用于阵列寻址) -
绝缘保护层
2.3.3 优势
-
灵敏度高(适合细微触觉):可以检测小于 0.01N 的压力,适用于精细操作。
-
适用于高分辨率阵列:可用于高精度机器人手指触觉,实现局部精细感知。
-
动态范围大:能够适应不同的力感应,从轻触到按压都能检测。
-
低能耗:由于检测电容变化几乎不需要直流偏置电流,可以以很低能耗持续工作。
2.3.4 劣势
-
成本较高:由于监测信号较弱,监测电路成本、硬件采样成本较高,材料制造工艺要求高,量产成本较大。
-
易受环境影响:湿度、温度、电磁干扰(EMI)可能影响测量精度。
-
需要标定:需标定出场电容,根据传感器形态做特定标定。
-
结构较厚:相比压阻式,整体尺寸较厚,不适用于超薄应用。难以规模化量产。
电容式架构层数较多,该技术路径下的主要玩家通过改变电极材料(如使用透明导电材料)以实现透明、柔性等特性,改变介电层材料以提升灵敏度,然而由于精密制造设备成本、工艺成本等问题总体制造成本较高,且下游客户在使用时仍需要承担由于电容式固有架构导致的电容标定成本。
2.4 电磁式
电磁式传感器基于霍尔效应研制,在MEMS结构的带动下发展较快,由于灵敏度较高、集成化、封装耐用性高等特性是广泛运用在消费电子领域,但因成本高、结构刚性、物理像素较大等劣势无法作柔性覆盖的电子皮肤。

-
磁性阵列层:嵌入柔性基体中的小型磁铁,形成初始磁场。 -
磁传感器阵列:检测X、Y、Z方向的磁场变化,推算受力大小与方向。 -
信号处理电路:处理磁场信号,进行误差补偿和触觉信息计算。 -
封装层:保护内部元件,增强耐用性。
-
稳定性高:相比电容式,受环境湿度、温度、电磁干扰影响较小,长期稳定性好。 -
适用于动态力检测:能够检测快速变化的力,如振动、滑动摩擦等。 -
高灵敏度:可用于微小力检测(mN 级别),适合精细操作应用。 -
封装耐用性强:可封装在密闭环境中,防护性更好,适用于恶劣工业环境。
-
受限于MEMS技术:目前主流方案依赖MEMS(微机电系统)结构,难以大规模扩展至高密度传感阵列。 -
无法适应曲面覆盖:必须使用内嵌传感器,由于硬质磁性材料和传感元件的限制,难以应用于柔性曲面。 -
传感器本身决定性能上限:磁性材料和传感器本身的物理特性限制了检测精度,主要依赖算法优化和拟合补偿,而无法从硬件上突破。 -
受外部磁场影响较大。
2.5 视触觉式
-
光源(LED/激光/光纤) -
光电传感器(CCD/CMOS) -
弹性光学材料(透明PDMS、光学凝胶) -
信号处理单元(计算机视觉算法)
-
最高分辨率(可达 1000+点/cm²):适用于超精细触觉检测,如物体表面纹理识别。 -
可提供三维触觉信息:结合视觉分析,可以检测表面形变、纹理、滑动摩擦等信息。 -
信号丰富度高:相比其他技术,光学方法能提供最详细的触觉反馈,如检测摩擦方向、剪切力等。
-
成本最高:需要 CMOS 传感器、光学透镜、透明弹性体等高成本材料。 -
数据处理复杂:需要计算机视觉算法,如深度学习或模式匹配,大幅增加计算需求。 -
封装复杂:光学组件对安装精度要求高,避免光线散射或环境光干扰。
三、赛道玩家分析
3.1 海外&上市公司

3.2 创业企业

四、细分场景解析
4.1 人形机器人
-
力分布 & 低成本大面积覆盖要求 > 绝对力精度要求: -
机器人手部操作时,单点绝对力的测量误差并不关键(如人形机器人厂商测试精度阶梯为0.5N),厂商关注整体接触面(曲面+侧面)的大范围力分布。 -
尤其针对国内人形厂商,需要低成本、可大面积覆盖的触觉技术,实现异形表面的全面感知,覆盖 >60% 外部表面,保障交互安全。
-
-
泛化、全面的触觉数据采集需求: -
针对人形机器人端到端训练需求,厂商希望得到多模态、多维度的数据。视觉数据的泛化能力有限(识别精准度 60%-70%),触觉数据具有更高精度。 -
视触觉传感器不适合广泛覆盖的前提下,海外厂商倾向于采用少数视触觉传感器+大面柔性逾渗式传感器方案。
-
-
根据Verified Market Research的预测,2020年全球触觉传感器市场规模为112.5亿美元,而到2028年,预计将达到260.8亿美元。 -
传感器BOM占比最大,柔性触觉传感需求迅速渗透。以特斯拉Optimus为例,当前整体BOM成本为42.08万元,传感器是价值占比最大的环节,成本达12.86万元,占比约为30%。随着电子皮肤大面积覆盖,触觉传感器BOM占传感器成本迅速提升,预计达20%。 -
GGII预测,2024年全球人形机器人市场规模为10.17亿美元,到2030年全球人形机器人市场规模将达到150亿美元,2024-2030年CAGR 将超过56%,全球人形机器人销量将从1.19万台增长至60.57万台。
4.2 消费场景
4.2.1 关键触觉需求
-
低成本 + 低损耗 + 量产性
-
首要关注成本控制,传感器需要长期稳定&低功耗,适应大规模量产需求。
-
无精度需求 + 柔性轻量化设计
-
相比工业与人形机器人,精度要求较低,需要可弯曲、耐用、轻量化设计,适用于软体产品,如床垫、智能座椅、AI玩具。
-
智能床垫市场:全球智能床垫市场规模预计 2025年超80亿美元,触觉传感器BOM占比约 5-8%。 -
智能玩具市场:2024年全球 AI 互动玩具市场规模预计 50亿美元+,未来年均增长率 15%+。触觉传感器BOM占比 3-5%,预计市场需求 1.5-2.5亿美元。 -
割草机器人市场:2025年全球智能割草机市场预计超 30亿美元,年增长率 10%+。触觉传感器BOM占比 4-6%,预计市场需求 1.2-2亿美元。
4.3 车用场景
-
耐用性 & 机械疲劳抗性 -
首要关注耐用性, 耐高低温、耐疲劳、抗冲击、抗静电,确保长寿命稳定运行,需通过车规级标准认证。 -
透气性 & 柔性舒适设计 -
传感器应用于车内座椅、地毯、方向盘等部位,需保证舒适性,如高透气性。结构上轻量化 & 柔性化设计,适配座椅形态,避免影响乘坐舒适度。
-
2025年:全球L3-L5级自动驾驶汽车销量预计300万辆,假设单车智能座舱触觉传感器价值150美元,则市场规模约为45亿美元。 -
2030年:全球L3-L5级自动驾驶汽车销量预计1200万辆,假设单车智能座舱触觉传感器价值提升至200美元,则市场规模约为240亿美元。
4.4 工业场景
-
精确力控:装配、研磨、抛光等精密操作需控制接触力在0.1-20N范围 -
表面测量:产品质量检测需感知微小表面缺陷(0.05-0.1mm) -
防滑抓取:处理多种材质物体时检测滑动趋势(响应时间<50ms) -
工艺一致性:保证重复工艺的力度一致性(误差<±2%)
-
由单点力传感向多点触觉阵列演进 -
传感与控制算法深度融合,实现柔顺接触 -
逐步从高端机型向中端机型渗透 -
有望在2025年成为中高端工业机器人标配 -
根据行业数据,工业检测市场(全行业高精密检测设备)市场规模为全球30亿-70亿人民币,市场增速放缓,竞争格局较为稳定。
触觉传感器作为下一代智能机器人及智能设备的核心感知模块,正处于技术迭代与应用拓展的关键阶段。在需求侧,随着人形机器人及各类智能交互产品加速落地,触觉传感器的应用场景已从传统工业检测向非结构化、高动态、高使用频率的新兴场景快速延伸;而在供给侧,技术创新正推动触觉传感器实现性能跃迁——灵敏度提升、环境适应性增强、成本持续优化、寿命显著延长,同时刚性结构逐步向柔性覆盖升级。供需双轮驱动下,触觉传感器在具身智能、医疗康复、消费电子、智能汽车、精密制造等领域的潜力将加速释放,成为智能化浪潮的重要推手。
深蓝资本将持续追踪并深入解析具身智能产业链中的细分赛道与创新场景,为行业参与者提供前瞻洞察。敬请期待后续系列研究报告,共同探索智能感知时代的无限可能。


先进制造:中科慧远 | 超睿科技 | 蓝星光域 | 灵西机器人 | 拓璞科技 | 华睿科技 | 艾利特机器人 | 希荻微(证券代码688173)| 天数智芯| 嘉轩智能 | 蚂蚁工场 | 宏诚创新 | 京济通信
信息技术:嘉为科技 |天云数据|斗象科技|华控清交|森亿智能|迅策科技|青云科技(证券代码 688316)|明略科技|巨杉数据库| 数澜科技 | 竹云科技| 安世亚太| 清云智通 | 秦淮数据(证券代码 CD.O) | 金山云 (证券代码 KC.O) | 网宿科技(证券代码 300017)| 天地和兴
深蓝研究 | 具身智能系列研究(一)触觉传感器
